飞思仿真平台
智创未来,仿真无界

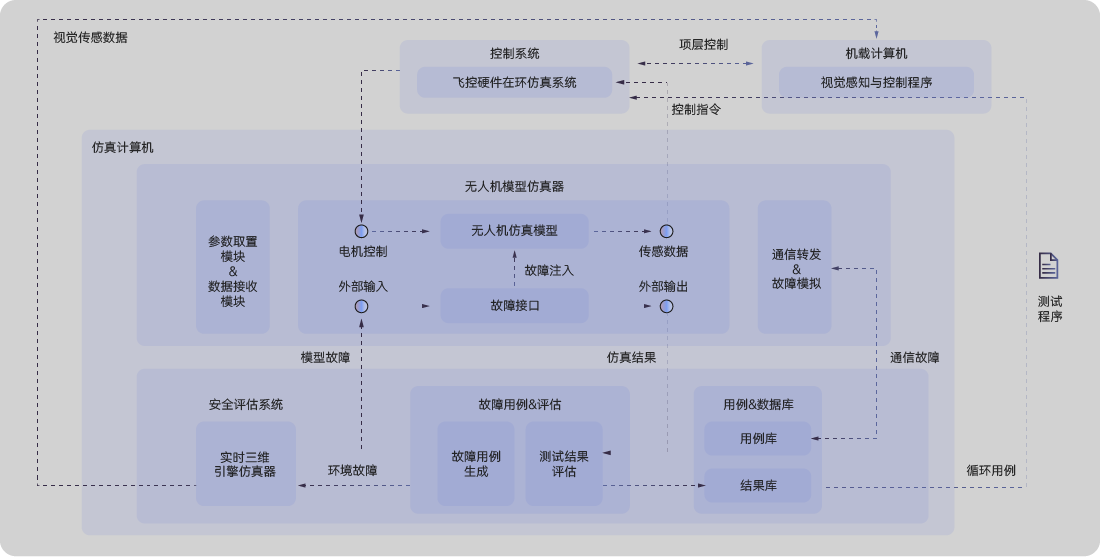
智能无人集群系统自动化设计与开发工具链。飞思实验室提供无人系统从算法开发、到硬件在环仿真、再到真机部署实验的全流程自动化解决方案。该工具链采用基于模型(MBD)的设计理念,基于PX4、MATLAB/Simulink和ROS等软件系统以及相关智能硬件,实现仿真到真机的无缝过渡(Sim2Real)。


飞思仿真平台
- 高逼真仿真
- 仿真全流程
- 支持多种机型仿真
高逼真仿真
高逼真仿真
统一性,标准的开发、测试与评估框架
仿真全流程
仿真全流程
仿真全流程,统一性,标准的开发、测试与评估框架

支持多种机型仿真
支持多种机型仿真
支持多种机型仿真,标准的开发、测试与评估框架

- 提供高逼真的3D视景
- 支持基于视觉的控制
- 支持多种故障注入
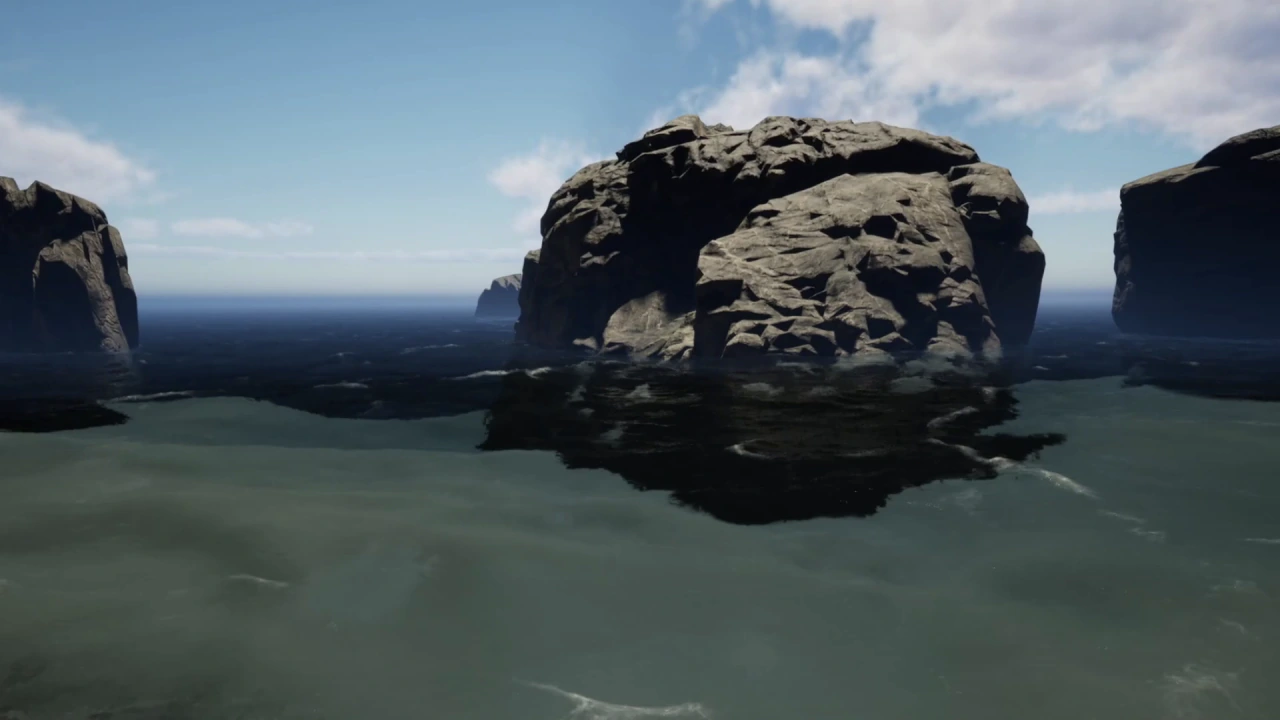
提供高逼真的3D视景
提供高逼真的3D视景
场景支持物理碰撞引擎,全球地形和地图,OSGB+Cesium倾斜摄影视景地图导入,自定义GPS 坐标

支持基于视觉的控制
支持基于视觉的控制
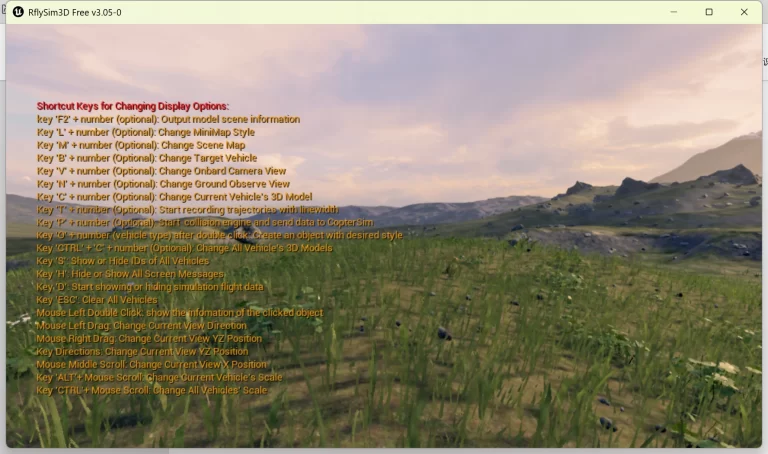
支持通过共享内存的方式在Simulink、Python、C/C++等代码平台中实时获取到图像数据并进行处理

支持多种故障注入
支持多种故障注入
模型故障、通信故障和环境故障
产品功能说明
免费版
单台电脑最多支持8架飞机软硬件在环仿真
支持1架飞机的视觉板卡在环仿真
视觉支持3路RGB、灰度或深度图像
支持激光点云、分割图等
支持创建20个载具实体
提供接口例程、基础例程、和进阶例程
个人版
增加自动代码生成SITL仿真支持
支持HITL_NET 仿真
企业版
支持联机,分布式仿真
无人智能体数量不限制
支持多视觉板卡仿真
支持16个控制通道
支持UE5引擎
支持Cesium全球大场景仿真
创建的载具实体数量不限
支持导入智能蓝图载具
提供定制例程
相关方案
飞控视觉套件
