飞思分布式集群平台
自主任务分配,智能路径规划

分布式集群控制平台适用于复杂环境中的无人机集群控制,具备自主的任务分配、路径规划等功能:完整的集群系统可支持机地、机间两两通讯;具有应对突发事件鲁棒性好,数据链通信需求低的优势。

飞思分布式集群平台
- 智能化、自主化集群
- 分布式通讯,大范围组网
- 多任务、大规模集群
智能化、自主化集群
智能化、自主化集群
配备高性能机载板卡,实现机间自主分配任务(牛耕法、信息素法等),完成规划路径;具备机间避障算法,在复杂集群、多任务并行的情况下保障无人机的安全/有序飞行
分布式通讯,大范围组网
分布式通讯,大范围组网
采用分布式组网,两点间通讯距离达10km,可有效避免集中式集群中心节点受干扰后,集群瘫痪的情况

多任务、大规模集群
多任务、大规模集群
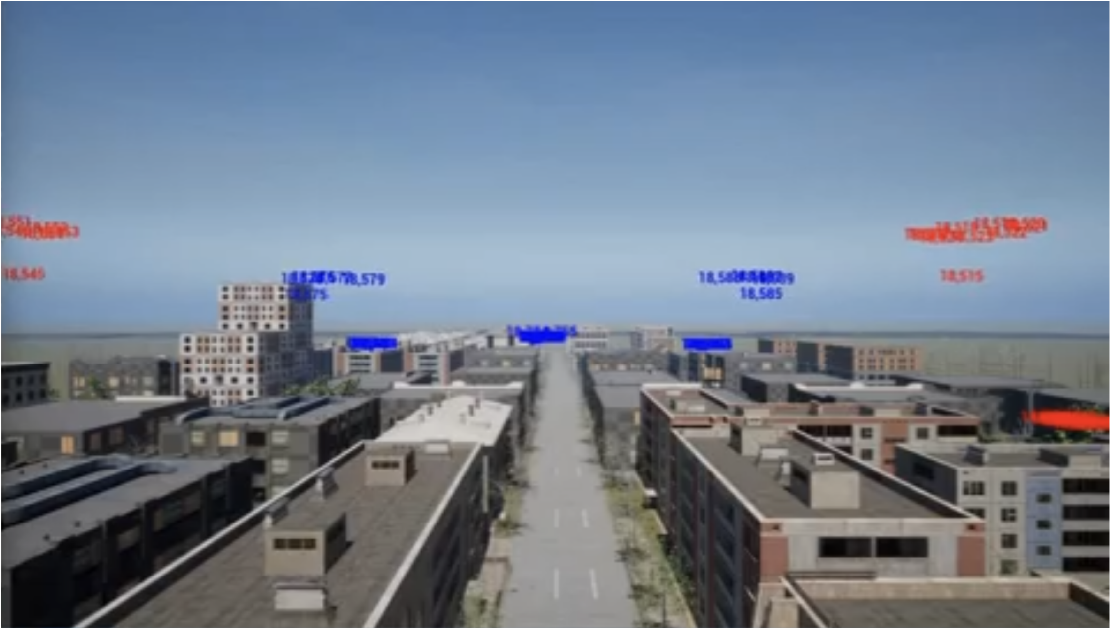
最多可控32架无人机,应用场景覆盖侦察/跟踪/打击/抛投/测绘等;识别目标包括人/车/时敏/障碍等

- 全方位集群健康监管
- 仿真/实飞全闭环
- 平台交互友好,支持临机调度
全方位集群健康监管
全方位集群健康监管
具备无人机飞前/飞中健康监测功能;调取机载日志、集群控制日志;无人机在通讯干扰情况下可自动返航,在低电模式下可自主降落

仿真/实飞全闭环
仿真/实飞全闭环
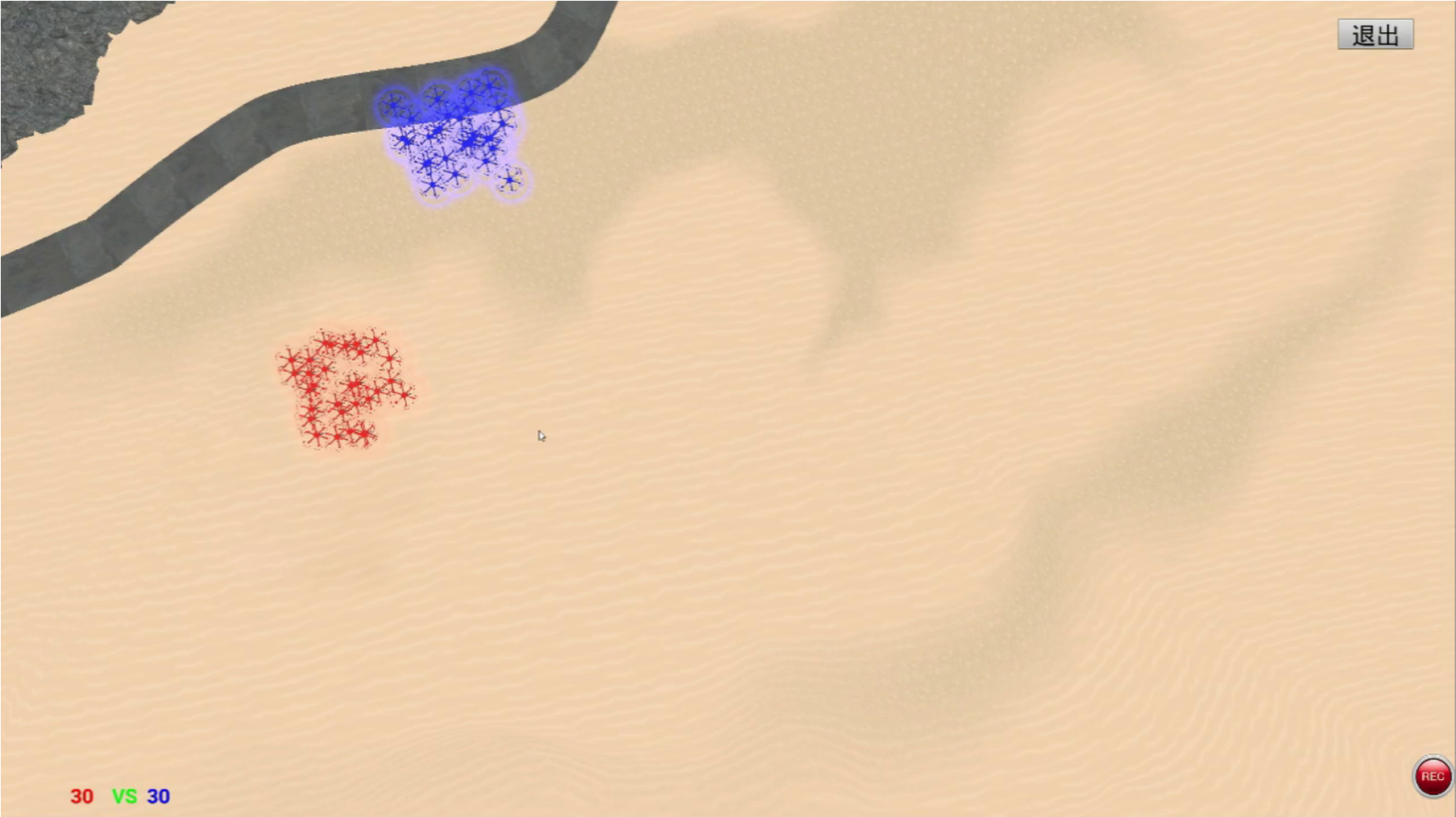
可连接Rflysim进行软件在环仿真,初步验证集群算法实现效果;在此基础上增加集群仿真硬件单元,进行硬件在环仿真验证;可支持半实物仿真及虚实结合,实现集群算法的分步验证;提供标准化、完整的验证流程
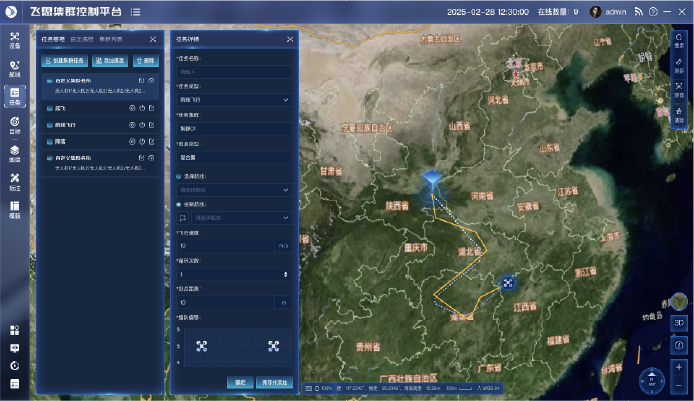
平台交互友好,支持临机调度
平台交互友好,支持临机调度

产品功能说明
在售版本
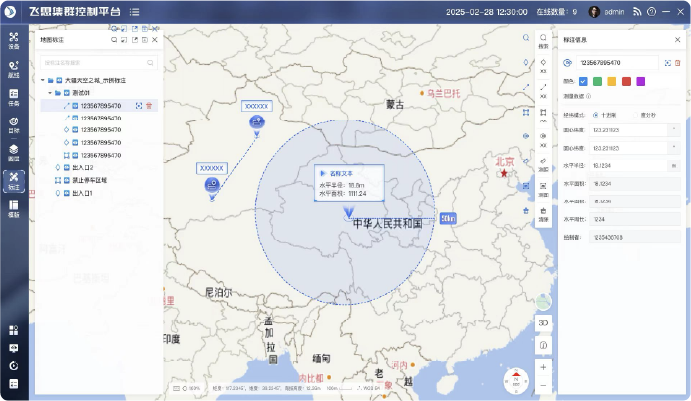
地面控制系统可发布任务、显示无人机态势
各无人机具备机间通信,自主完成编队控制
具备典型任务执行能力(放飞前出、侦察搜索、协同侦察、返航回收)
对人员、车辆目标进行识别,解算位置
具备无人机编队协同控制算法库
相关方案
室外集群
